Contents
clear; close all
錐体分光感度の設定
whichCones = 'SmithPokorny';
[S_cones, T_cones, S_Y, T_Y] = SetFundamentals2(whichCones);
factors = (T_cones(1:2,:)'\T_Y');
T_cones = diag([factors ; 1])*T_cones;
Brainard (1996)に載っている例題で検算してみる
bgLMS = [2 4 3]';
test_LMSInc = [2 -2.5 1]';
dkl = OurConeIncToDKL(test_LMSInc, bgLMS, T_cones, T_Y);
fprintf('L+M = %g, L-M = %g, S = %g\n', dkl(1), dkl(2), dkl(3));
L+M = -0.144338, L-M = 1.2112, S = 0.416667
DKL_Demoの計算:キャリブレーションデータを使って、実際に計算してみる
cal = LoadCalFile('PTB3TestCal');
S = cal.S_device;
calLMS = SetSensorColorSpace(cal,T_cones,S_cones);
calLMS = SetGammaMethod(calLMS,1);
calLum = SetSensorColorSpace(cal,T_Y,S_Y);
bgPrimary = [0.5 0.5 0.5]';
bgLMS = PrimaryToSensor(calLMS,bgPrimary);
M_ConeIncToDKL = ComputeDKL_M(bgLMS,T_cones,T_Y);
ディスプレイで表示できる最大値に基づきスケーリングした変換行列で計算
M_ConeIncToDKL_Device = OurComputeDKL_M_Device(bgLMS,T_cones,T_Y,calLMS);
coneInc = M_ConeIncToDKL_Device\eye(3);
DKL_unit_LMS = coneInc + repmat(bgLMS,1,3);
DKL_unit_Primary = SensorToPrimary(calLMS, DKL_unit_LMS);
load T_xyz1931;
T_xyz = SplineCmf(S_xyz1931,683*T_xyz1931,S);
cal_XYZ = SetSensorColorSpace(cal,T_xyz,S);
DKL_unit_xyY = XYZToxyY(PrimaryToSensor(cal_XYZ, DKL_unit_Primary));
bg_xyY = XYZToxyY(PrimaryToSensor(cal_XYZ,bgPrimary));
fprintf('\nxyY coordinates\n');
fprintf('1.0 L+M = (%.4f, %.4f, %.4f)\n', DKL_unit_xyY(1,1),DKL_unit_xyY(2,1),DKL_unit_xyY(3,1));
fprintf('1.0 L-M = (%.4f, %.4f, %.4f)\n', DKL_unit_xyY(1,2),DKL_unit_xyY(2,2),DKL_unit_xyY(3,2));
fprintf('1.0 S = (%.4f, %.4f, %.4f)\n', DKL_unit_xyY(1,3),DKL_unit_xyY(2,3),DKL_unit_xyY(3,3));
fprintf('Bkg = (%.4f, %.4f, %.4f)\n', bg_xyY(1),bg_xyY(2),bg_xyY(3));
xyY coordinates
1.0 L+M = (0.2825, 0.2990, 144.4568)
1.0 L-M = (0.3285, 0.2797, 77.0038)
1.0 S = (0.2502, 0.2125, 76.5901)
Bkg = (0.2825, 0.2990, 77.0074)
各錐体感度と対応した分光視感効率で輝度を計算する
DKL_unit_Lum = PrimaryToSensor(calLum, DKL_unit_Primary);
bg_Lum = PrimaryToSensor(calLum, bgPrimary);
fprintf('\nLuminances calculated with the modified luminous efficiency\n')
fprintf('1.0 L+M = %.4f\n', DKL_unit_Lum(1));
fprintf('1.0 L-M = %.4f\n', DKL_unit_Lum(2));
fprintf('1.0 S = %.4f\n', DKL_unit_Lum(3));
fprintf('Bkg = %.4f\n', bg_Lum);
Luminances calculated with the modified luminous efficiency
1.0 L+M = 145.3638
1.0 L-M = 77.4907
1.0 S = 77.4907
Bkg = 77.4907
極座標系での表示
dkl_polar = LinearDKLToPolarDeg(eye(3));
fprintf('\nPolar coordinates (Radius, Azimuth, Elevation)\n')
fprintf('1.0 L+M = (%.2f, %4.1f, %4.1f)\n', dkl_polar(1,1),dkl_polar(2,1),dkl_polar(3,1));
fprintf('1.0 L-M = (%.2f, %4.1f, %4.1f)\n', dkl_polar(1,2),dkl_polar(2,2),dkl_polar(3,2));
fprintf('1.0 S = (%.2f, %4.1f, %4.1f)\n', dkl_polar(1,3),dkl_polar(2,3),dkl_polar(3,3));
Polar coordinates (Radius, Azimuth, Elevation)
1.0 L+M = (1.00, 0.0, 90.0)
1.0 L-M = (1.00, 0.0, 0.0)
1.0 S = (1.00, 90.0, 0.0)
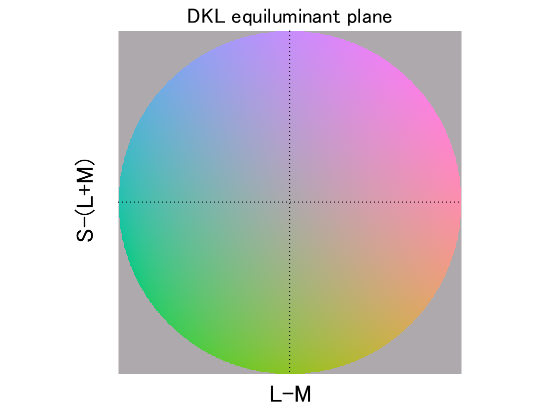
等輝度面の色表示
imageSize = 513;
[X,Y] = meshgrid(0:imageSize-1,0:imageSize-1);
X = X-(imageSize-1)/2; Y = Y-(imageSize-1)/2;
X = X/max(abs(X(:))); Y = Y/max(abs(Y(:)));
XVec = reshape(X,1,imageSize^2); YVec = -reshape(Y,1,imageSize^2);
imageLMS = bgLMS*ones(size(XVec))+coneInc(:,2)*XVec+coneInc(:,3)*YVec;
[imageRGB,badIndex] = SensorToSettings(calLMS,imageLMS);
bgRGB = SensorToSettings(calLMS,bgLMS);
vecLength = hypot(XVec, YVec);
imageRGB(:,find(vecLength > 1)) = bgRGB(:,ones(size(find(vecLength > 1))));
rPlane = reshape(imageRGB(1,:),imageSize,imageSize);
gPlane = reshape(imageRGB(2,:),imageSize,imageSize);
bPlane = reshape(imageRGB(3,:),imageSize,imageSize);
theImage = zeros(imageSize,imageSize,3);
theImage(:,:,1) = rPlane;
theImage(:,:,2) = gPlane;
theImage(:,:,3) = bPlane;
figure; clf;
image(theImage);
hold on;
plot([imageSize/2, imageSize/2], [0, imageSize], 'k:');
plot([0, imageSize], [imageSize/2, imageSize/2], 'k:');
title('DKL equiluminant plane', 'FontSize',16);
axis off; axis equal;
text(imageSize/2,imageSize+30,'L-M', 'FontSize', 18, 'HorizontalAlignment','center');
text(-50,imageSize/2,'S-(L+M)', 'FontSize', 18, 'HorizontalAlignment','center', 'Rotation',90);
axis([1 imageSize 1 imageSize]);